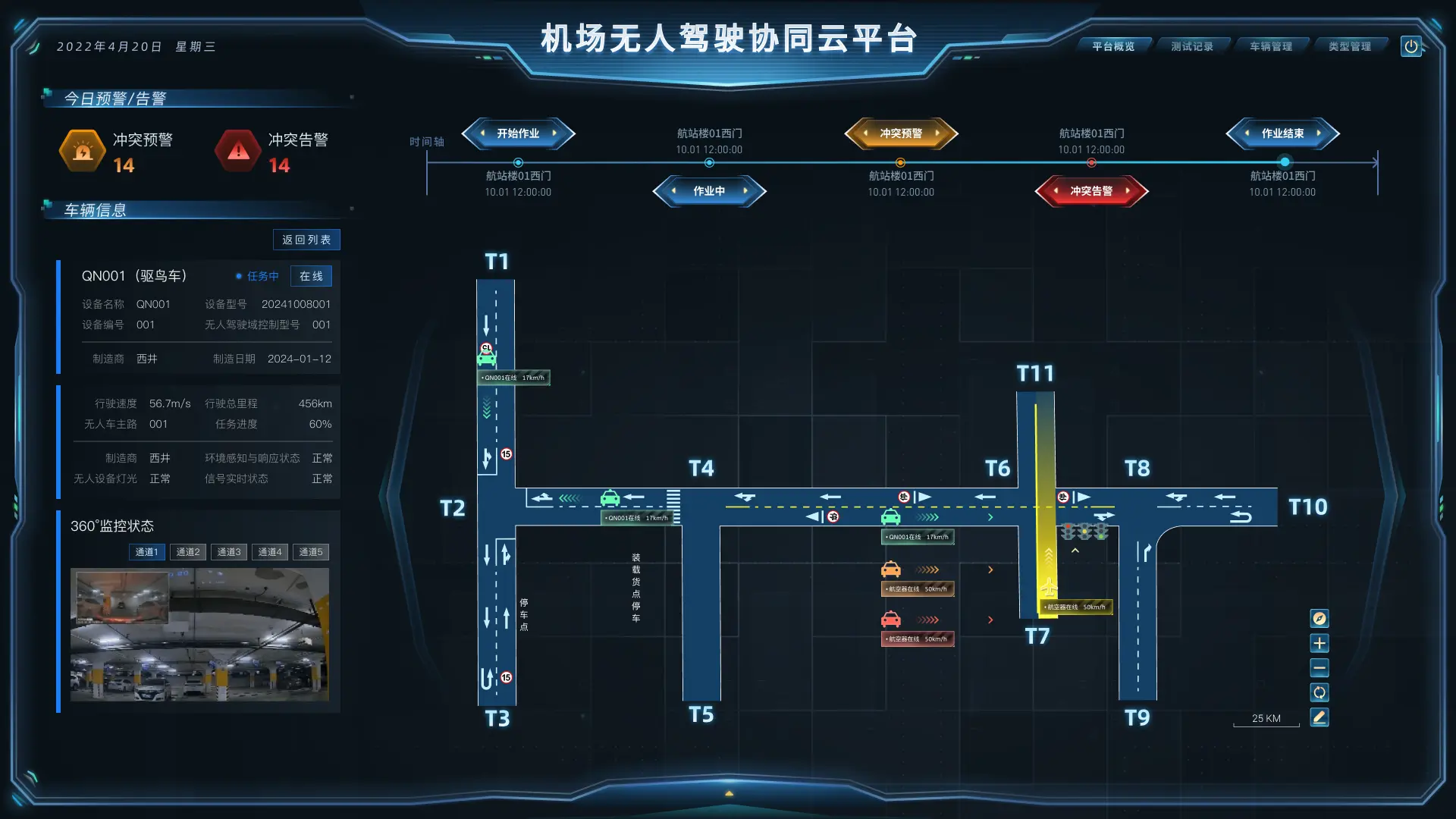
机场无人驾驶协同云平台
Unity开发实时数据展示大屏可视化GPS 坐标转换多分辨率适配事件驱动架构安全预警系统
基于 Unity 引擎开发的青岛机场场面车辆实时监控与安全预警大屏系统,通过 WebSocket 接入多源实时数据,结合 GPS 坐标转换与状态机模型,实现无人驾驶车、特种车辆、航空器等地面交通态势的可视化展示与三级碰撞预警,支持 1920×1080 / 3840×1080 双分辨率适配控制室部署。
技术方案
- 基于 WebSocket 长连接实现多类型报文(位置更新、碰撞预警、交通灯、车辆指令)的实时数据接入与解析,采用事件驱动架构解耦数据层与表现层
- 实现 GPS 经纬度到屏幕坐标的数学转换模型(等角投影 + 旋转补偿 + 动态缩放),将真实机场场面车辆轨迹映射至大屏画布
- 设计双层分辨率适配方案(1920×1080 / 3840×1080),通过场景自动切换与 UI 自适应布局支持控制室超宽屏与标准屏部署
- 建立车辆状态机模型(在线→离线超时检测 / 正常→预警→告警三级递进),结合平滑插值移动与视觉反馈实现实时态势感知
- 开发自定义 Editor 工具链(Hierarchy 增强、Inspector 扩展调试面板、场景切换自动分辨率适配),提升开发与调试效率
- 采用 Singleton 管理器 + ScriptableObject 配置 + 部分类分离 UI 声明的模块化架构,支撑多面板(今日作业、安全指标、车辆列表、作业流程等)协同刷新