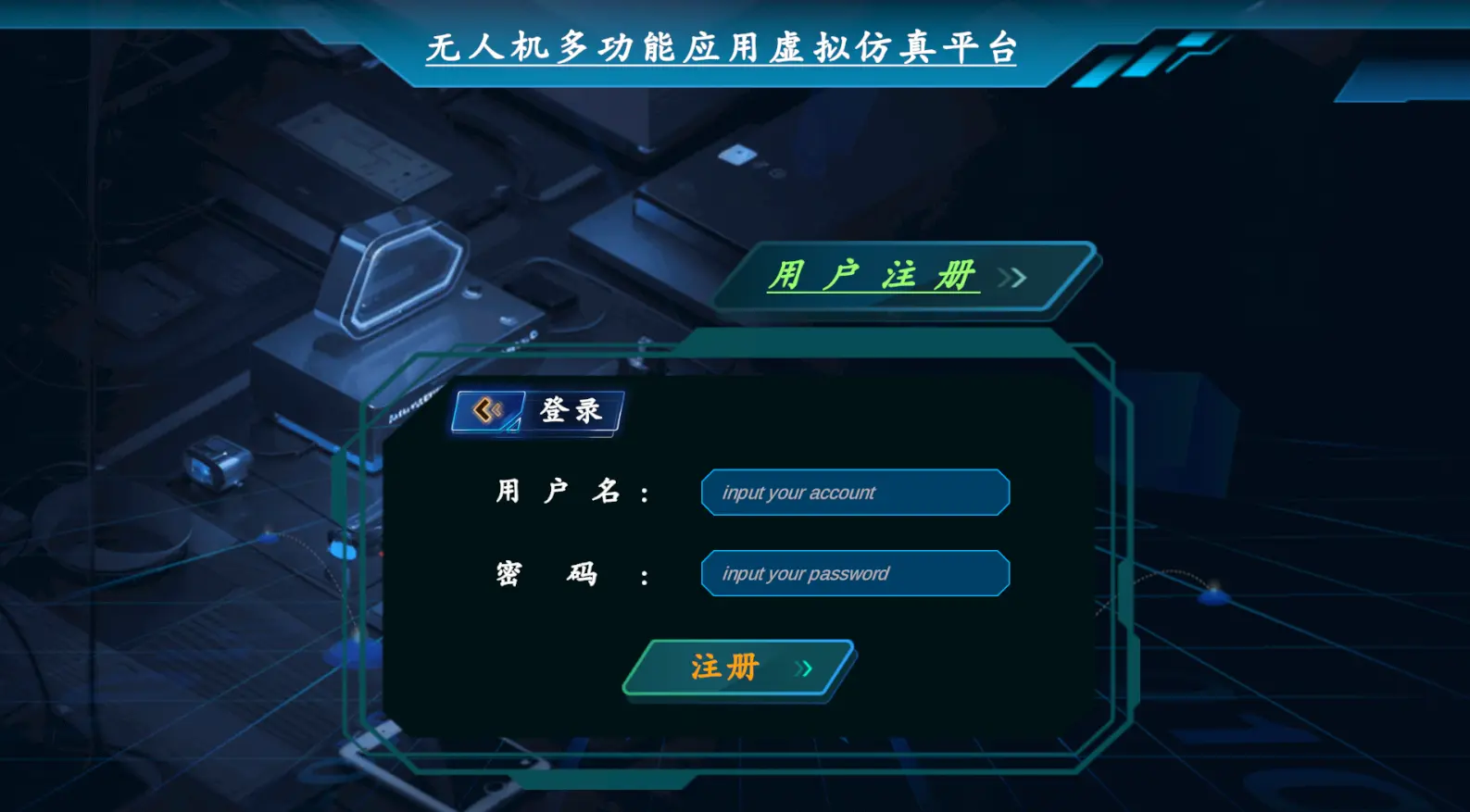
无人机多功能应用虚拟仿真系统
虚拟仿真游戏开发Unity3DWebRTCMQTT
基于 Unity 3D 引擎开发的无人机虚拟仿真综合平台,覆盖物流运输与工业巡检两大业务场景。核心实现了 Rigidbody 物理驱动的六自由度飞控系统,自研二次贝塞尔曲线路径编辑器支持 Editor 模式预览与自动巡航,集成 WebRTC 低延迟图传与 GPT-SoVITS AI 语音播报实现巡检自动化,搭配 MySQL 用户系统与事件驱动的任务流水线架构,形成"登录认证→航线规划→自动飞行→实时回传→语音检测→任务结算"的完整闭环。
技术方案
- 模块化架构设计:划分为登录认证、物流运输、设备巡检三大功能模块,采用场景隔离 + 事件驱动解耦,各模块独立运行互不干扰
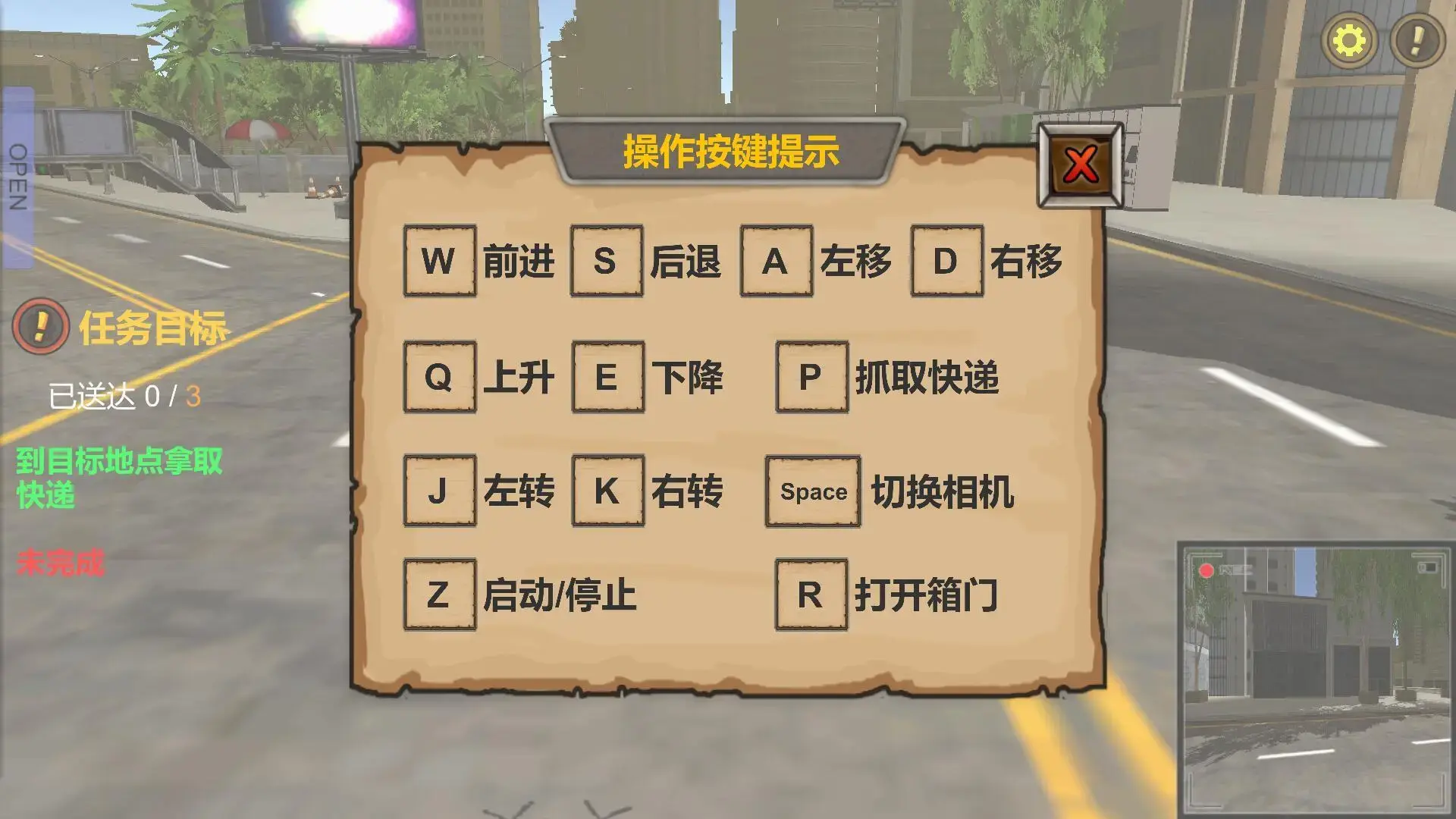
- 物理级无人机飞控系统:基于 Rigidbody 实现四旋翼动力学模拟,涵盖升降/转向/俯仰六自由度控制,叠加螺旋桨转速可视化、机身稳定算法与加减速平滑插值,模拟真实飞行手感
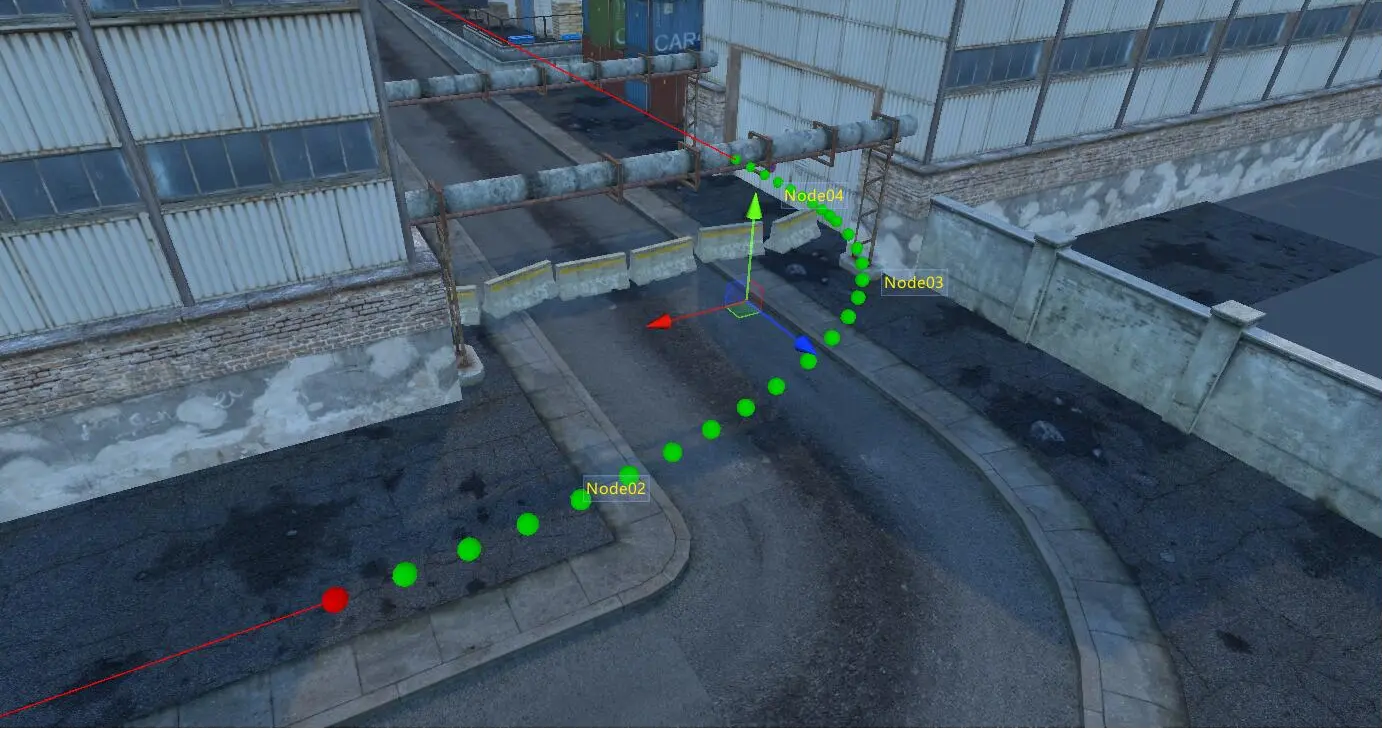
- 双套路径编辑与自动巡航:自研基于二次贝塞尔曲线的路径节点编辑器,支持曲线/直线/停留点混合编排、Editor 模式实时预览、多速度档位自适应调节(阈值与转速联动),巡检场景额外支持单次/往返/循环三种巡航模式
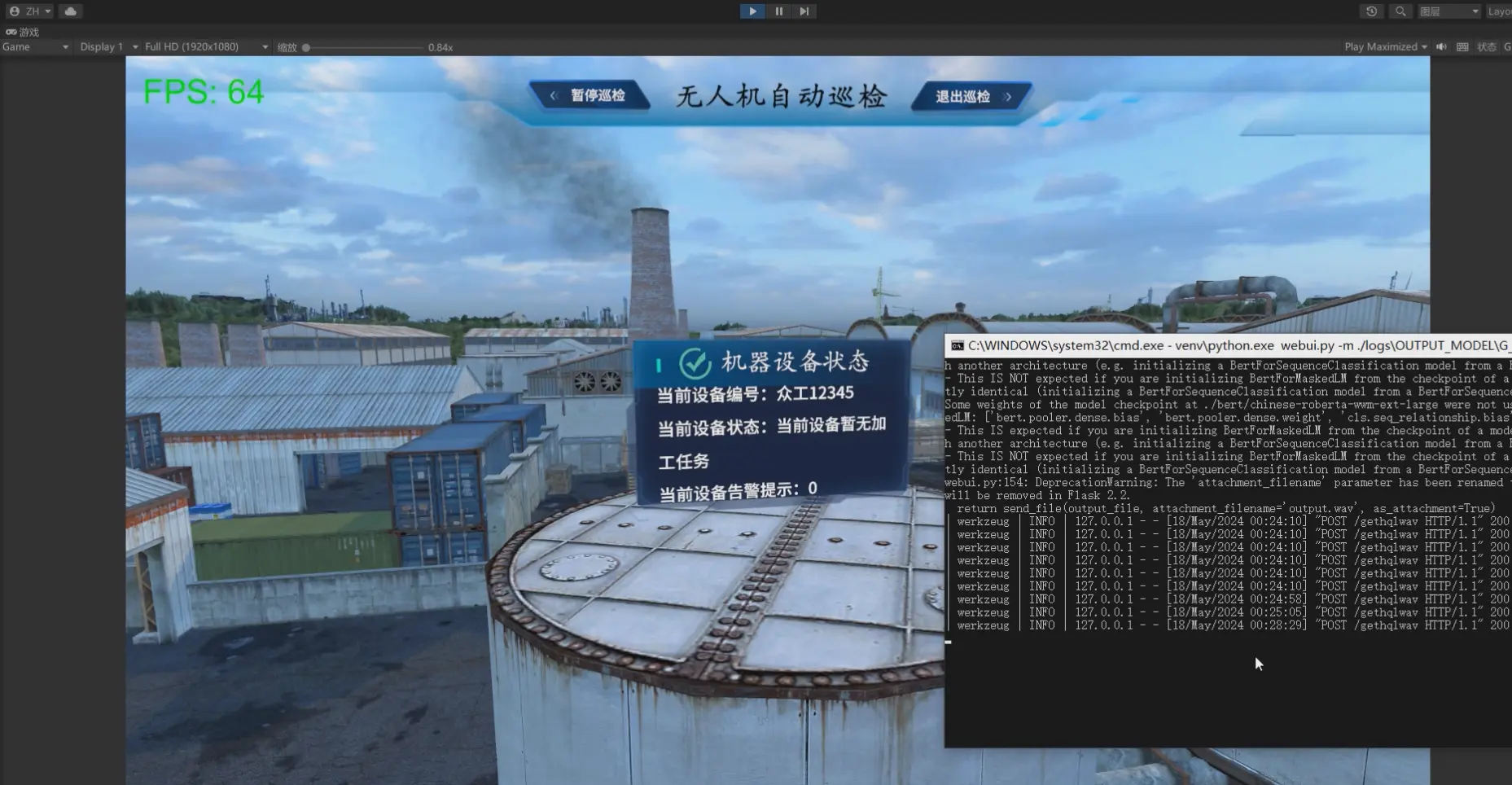
- WebRTC 实时图传:集成 Unity WebRTC 包实现无人机视角视频流的低延迟传输,配套信令服务器可配置化,巡检画面实时回传至地面站
- AI 语音播报巡检:对接 GPT-SoVITS 语音合成服务(HTTP POST),巡检途中自动触发设备状态播报,配合 Slerp 相机旋转实现"到达→偏航对准→语音播报→继续巡检"的完整自动检测流程
- MySQL 持久化与用户系统:直接集成 MySQL 驱动实现账号注册/登录/IP 记录,设计用户表、巡检记录表、影像记录表三张核心数据表,支持 ORM 式 CRUD 封装
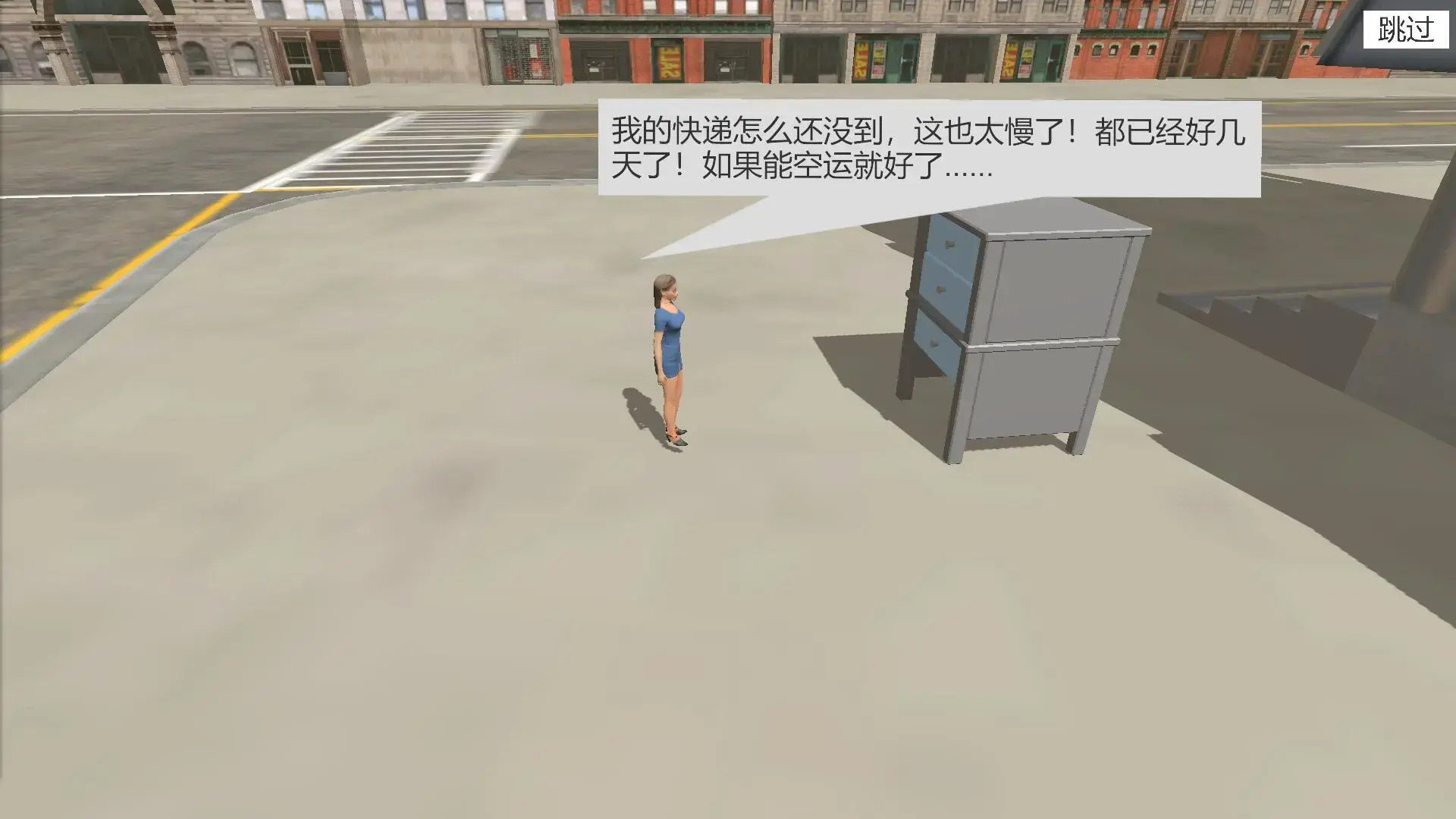
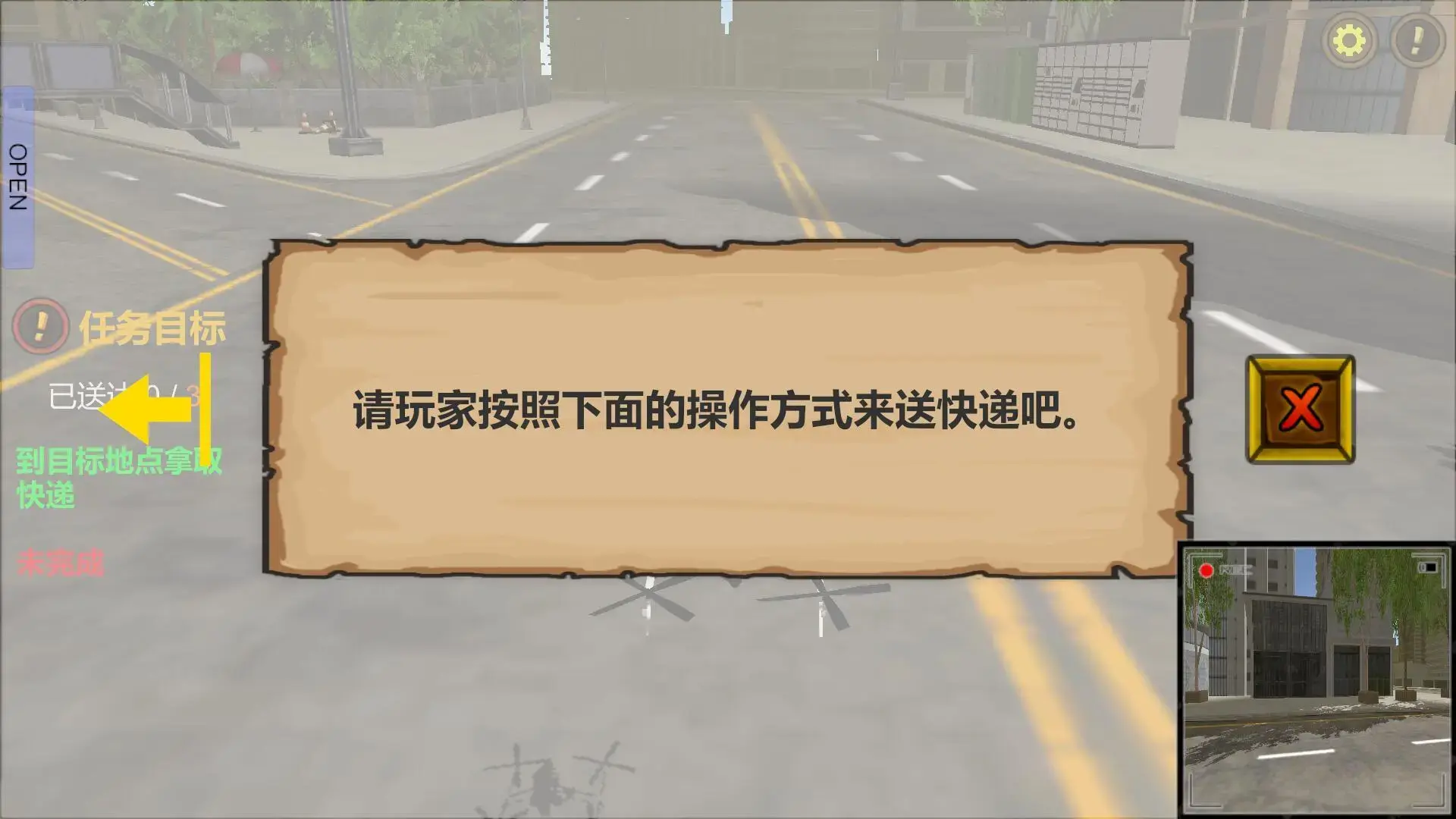
- 任务驱动物流玩法:基于 ScriptableObject 式配置(TaskInfo 结构体 + UnityEvent 回调链),实现取件→运输→送达的任务流水线,支持顺序任务链自动推进与 UI 实时同步
- 交互系统:射线检测抓取货物(支持手动/自动双模式)、LineRenderer 牵引绳可视化、快递柜开关交互、天气效果(雨量影响滑块进度)等,提升场景交互丰富度
- Editor 工具链:自定义 Scene 视图中路径节点名称标注(SceneGUI)、GrabExpress/CreateCurveLine/PathNode 等多组件 Inspector 扩展,提升策划配置效率